空間機器人與控制方法
近日,中國科學(xué)院沈陽自動化研究所在空間機器人自主操控方面取得了新進展,針對航天器平臺和機械臂的動力學(xué)耦合提出了一種基于時延估計的無模型解耦控制算法,相關(guān)成果以論文形式(Attitude Decoupling Control of Semifloating Space Robots Using Time-Delay Estimation and Supertwisting Control)發(fā)表在國際宇航領(lǐng)域Top期刊IEEE Transactions on Aerospace and Electronic Systems。
由于外太空的高低溫、超真空、強輻射等惡劣環(huán)境,由航天器和機械臂組成的空間機器人系統(tǒng),具備航天器的機動能力和機械臂的操作能力,未來將廣泛地應(yīng)用于在軌服務(wù)和深空探測領(lǐng)域。同時,空間機器人可承載大量的自主操作任務(wù),如抓捕、裝配、搬運以及采樣返回等。對于此類機器人,航天器平臺和機械臂之間存在著復(fù)雜的動力學(xué)耦合作用,嚴重影響機械臂末端的操作精度。因此,如何有效地抑制或補償基—臂耦合作用是空間機器人領(lǐng)域的熱點和難點問題。
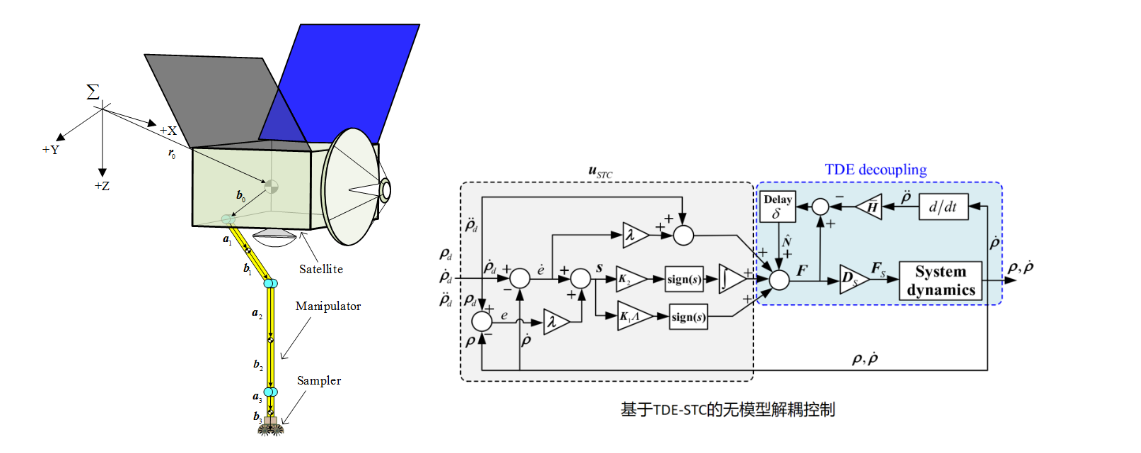
為此,沈陽自動化所空間自動化技術(shù)研究室科研人員基于時延估計(Time-delay estimation, TDE)算法和超扭轉(zhuǎn)控制(Super-twisting control, STC),提出一種無模型魯棒解耦控制算法。該方法本質(zhì)為瞬態(tài)學(xué)習(xí)控制算法,通過引入常數(shù)對角陣對動力學(xué)模型進行改造,將新模型劃分為線性項和新非線性項,利用模型前一時刻的觀測信息和控制輸入來估計當(dāng)前時刻系統(tǒng)的新非線性項,實現(xiàn)系統(tǒng)高效解耦。該方法優(yōu)點在于不需要實時計算系統(tǒng)模型參數(shù),算法具有內(nèi)在自適應(yīng)性,計算效率高。該項成果將為后續(xù)開展空間機器人在軌服務(wù)和深空探測任務(wù)提供理論基礎(chǔ)和技術(shù)支撐。
近年來,面向國家相關(guān)任務(wù)需求,圍繞空間機器人自主操控技術(shù),沈陽自動化所科研人員在空間機器人在軌捕獲、在軌加注、智能控制、空間人機交互等方面取得系列進展,相關(guān)成果發(fā)表于IEEE Trans. on Cybernetics,IEEE Trans. on Industrial Electronics, IEEE/ASME Trans. on Mechatronics, Nonlinear Dynamics, Acta Astronautica,Science China echnological Sciences, Chinese Journal of Aeronautics等期刊,相關(guān)成果得到國內(nèi)外研究人員的廣泛關(guān)注。
該研究得到了國家重點研發(fā)計劃、國家自然科學(xué)基金、中科院創(chuàng)新交叉團隊和機器人學(xué)國家重點實驗室自主課題等項目的大力支持。